Next:
マスプロパティ計算
Up:
ロボットの動作生成
Previous:
ベースリンク仮想ジョイントを用いた全身逆運動学法
Contents
Index
ベースリンク仮想ジョイントヤコビアン
ベースリンク仮想ジョイントのヤコビアンは 基礎ヤコビ行列の計算(Equation
) を利用し, 絶対座標系
,
,
軸の直動関節と 絶対座標系
,
,
軸回りの回転関節を それぞれ連結した
行列である. ちなみに,並進・回転成分のルートリンク仮想ジョイントのヤコビアンは 以下のように書き下すこともできる.
(
29
)
はベースリンク位置から添字
で表現する位置までの 差分ベクトルである.
2016-04-05
![[*]](crossref.png) )
を利用し,
絶対座標系
)
を利用し,
絶対座標系 軸の直動関節と
絶対座標系軸回りの回転関節を
それぞれ連結した
軸の直動関節と
絶対座標系軸回りの回転関節を
それぞれ連結した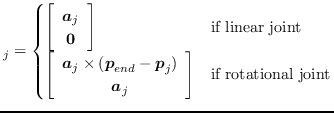
 はベースリンク位置から添字
はベースリンク位置から添字