Next: 非ブロック対角ヤコビアンによる全身協調動作生成 Up: ロボットの動作生成 Previous: 衝突回避のための関節角速度計算法 Contents Index
Fig.![[*]](crossref.png) では
では
![]() ,
,
![]() ,
,
![]() と設定した.
と設定した.
この衝突判定計算では,衝突判定をリンクの設定を
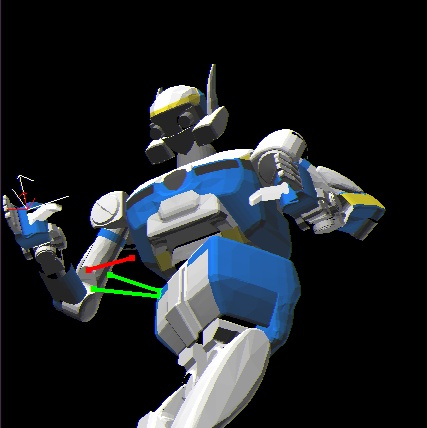
Fig. 例では衝突判定をするリンクを
「前腕リンク」「上腕リンク」「体幹リンク」「ベースリンク」
の4つとして登録した.
この場合, ![]() 通りのリンクのペア数から
隣接するリンクが除外され,全リンクペアは
「前腕リンク-体幹リンク」
「前腕リンク-ベースリンク」
「上腕リンク-ベースリンク」
の3通りとなる.
通りのリンクのペア数から
隣接するリンクが除外され,全リンクペアは
「前腕リンク-体幹リンク」
「前腕リンク-ベースリンク」
「上腕リンク-ベースリンク」
の3通りとなる.
Fig. の3本の線(赤1本,緑2本)が
衝突形状モデル間での最近傍点同士をつないだ
最短距離ベクトルである.
全リンクペアのうち赤い線が最も距離が近いペアであり,
このリンクペアより衝突回避のための
逆運動学計算を行っている.