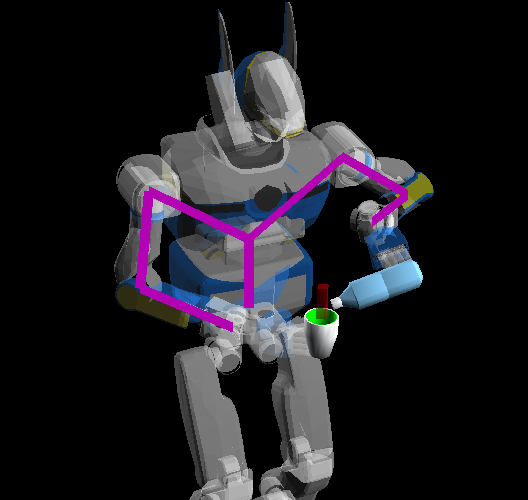
ヒューマノイドは枝分かれのある複雑な構造を持ち,
複数のマニピュレータで協調して動作を行う必要がある
(Fig.![[*]](crossref.png) ).
).
Figure:
Duplicate Link Sequence
|
|
複数マニピュレータの動作例として,
- リンク間に重複がない場合
それぞれのマニピュレータについて
Equation 式を用いて関節角速度を求める.
もしくは,複数の式を連立した方程式(ヤコビアンはブロック対角行列となる)
を用いて関節角速度を求めても良い.
- リンク間に重複がある場合
リンク間に重複がある場合は,
リンク間の重複を考慮したヤコビアンを考える必要がある.
例えば,双腕動作を行う場合,左腕のマニピュレータのリンク系列と
右腕のマニピュレータのリンク系列とで,体幹部リンク系列が重複し,
その部位は左右で協調して関節角速度を求める必要がある.
次節ではリンク間に重複がある場合の
非ブロック対角なヤコビアンの計算法
および
それを用いた関節角速度計算法を述べる
(前者の重複がない場合も以下の計算方法により後者の一部として計算可能で
ある).
2016-04-05